
robotic_manipulators_lego
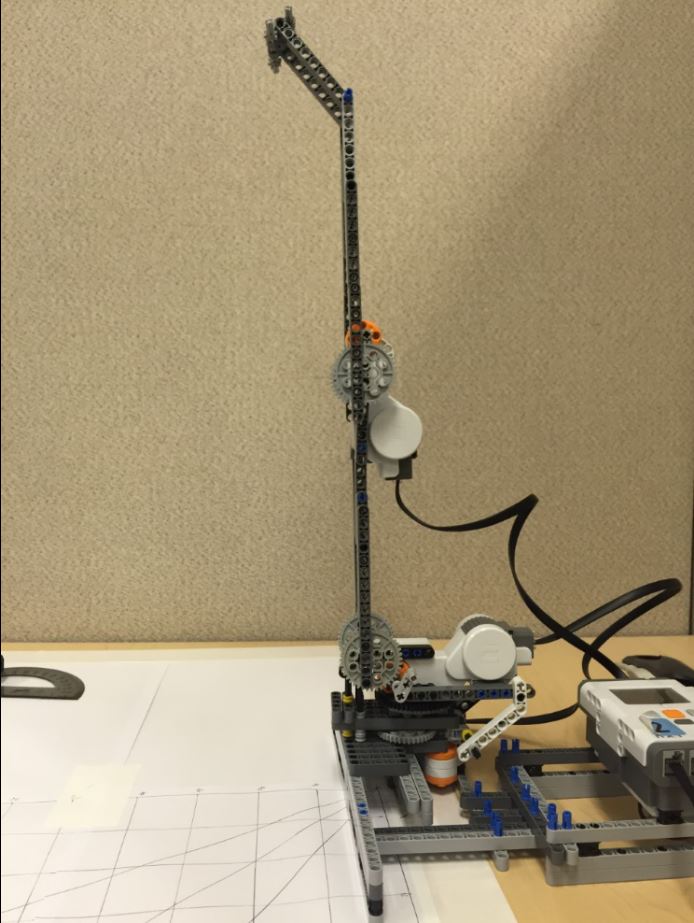
Lego Robotic Manipulator
Closed Form Solution
We can project the the manipulator in a 2D plane , wz , where w is the plane where the target is located.Using algebra a closed form solution for the inverse kinematics problem can be found for this particular Lego Manipulator.
Given the target coordinates in world coordinates , we can solve for the base angle A0 and the joint angles A1,A2,A3. The angle from the base can be easily found using:
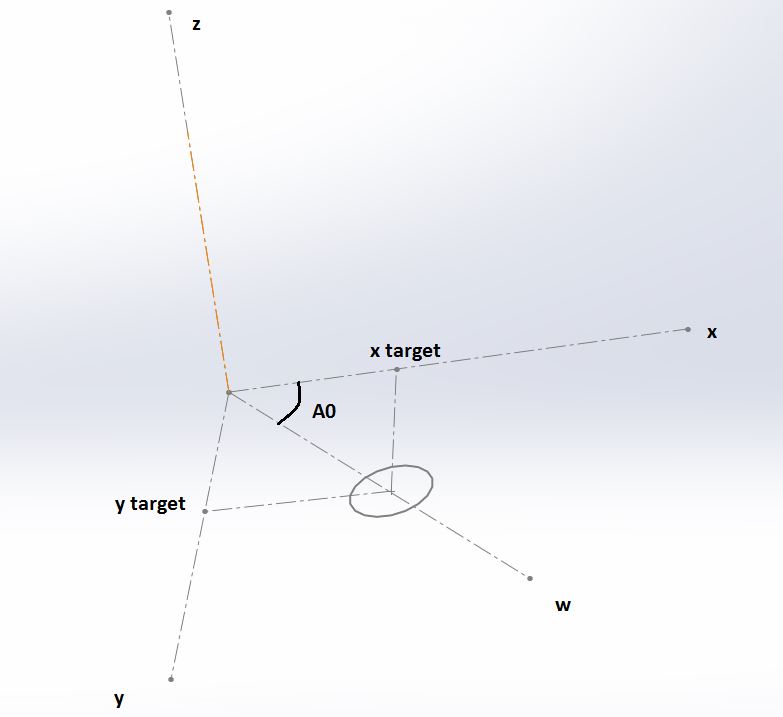
Projecting the manipulator in the wz plane , the problem now is 2D , and the closed form solution can be found using algebra.


robotic_manipulators_lego.txt · Last modified: by joaomatos