Following this tutorial you will be able to make the system balance like this:
Hardware And Software requirements:
You will need a NXT Brick and Matlab with Simulink version 2015 or higher.
Follow the step-by-step tutorial to install this ADD-ON on your Matlab provided by MathWorks.
- Following the tutorial , you will need to update the firmware of your Brick , just click next and it will auto update.However , many times an error can occur when updating for the first time. If your update fail and your brick don't want to turn on again and keep “Clicking” , you will need to recover the Brick and then update again. This “Clicking” is known as “Death Clicking Brick” or “Clicking Syndrome” , and is totally recoverable. Just Hard -reset your Brick and then follow the installation tutorial again and it should work.
To run the model , first run the script on matlab and then deploy the model to the hardware on the Simulink.
Part I) Getting the angles and calculating the velocities from the encoders:
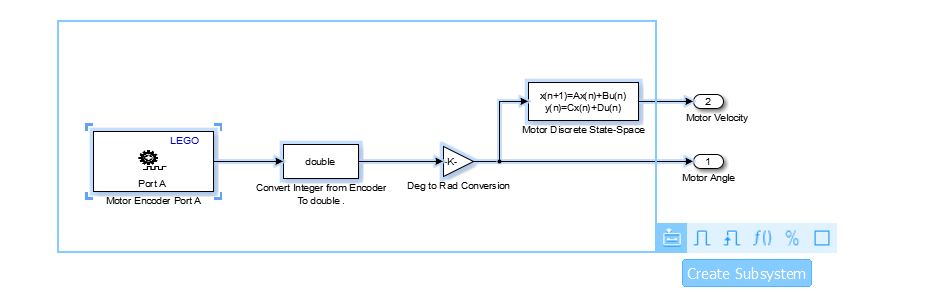
- Motor Encoder Logic: We can get the angle from the encoder using the “Encoder” block, the encoder block returns an integer value in degrees.However for our calculations is better to use a variable with better precision, so we use a “Data Type Conversion” block to convert the angle from integer to double precision. After , we need to convert this angle in degrees to radians , so a “Gain” block is used for this task. Using a “Discrete State – Space” block we can derive the velocity , using the angle as input.
1) Drag the following blocks to the work area: 1x Encoder / 1x Data Type Conversion / 1x Gain / 1x Discrete State Space / 2x Output (Out1).
2) Double click on the following blocks to modify its parameters:
- Encoder : Change the port to port A, reset mode as no reset, and sample time to -1.
- Data Type Conversion : Output type to double , Integer rounding mode to Simplest.
- Gain: change the value to pi/180 with element wise multiplication.
- Discrete State Space: Change the A,B,C,D matrix to the name of your A,B,C,D matrix that represents your discrete state space model stored on the workspace. Use the Sample time as you want ,can be 0.010. ( Be sure to use the same Sample time on the pendulum encoder and on the model configuration – will be explained later)
- Output: Change the name for Motor Angle and Motor Velocity.
3)Connections: Connect the blocks as shown in the picture. After connecting, select all the blocks and create a subsystem.
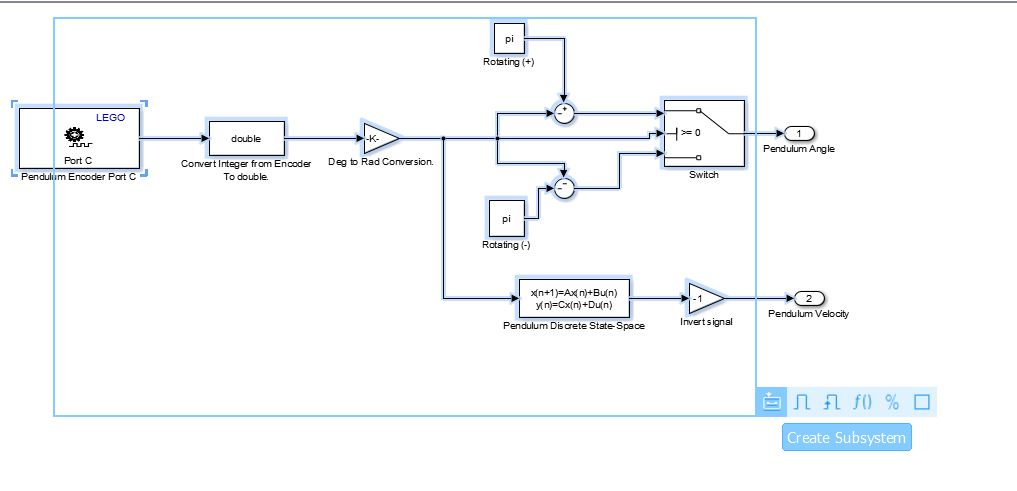
- Pendulum Encoder Logic:Follows the same logic of the motor encoder. However, we will introduce a switch block to act as a conditional clause to change the Pendulum position value (to be 0 on the Top, because as default, the 0 position will be the position when the system initialize).We have three inputs on the Switch Block, the top and the bottom inputs are what we want from the conditional expression and the middle input will act as our conditional clause. I chose to the 0 angle to be on the top equilibrium position, any position to the left of this vertical line to be positive angles, and any position to the right of this vertical line to be negative. On this case, the conditional clause will be when the pendulum angle is greater or equal to 0, it will receive the -angle +pi (this way, it will start from 180, all the way to 0) and if this is not true, it will receive –angle –pi (this way it will start from -180 all the way to 0 at the top). Note that because the angle is decreasing from 180 at the bottom to 0 at the top, the velocity when the pendulum is falling will be with an inverted signal (we use a -1 gain to the output velocity and this problem is solved). The Switch works this way: if the conditional clause is true , will pass by the top input , if is false , it will pass by the bottom input.
1) Drag the following blocks to the work area:1x Encoder / 1x Data Type Conversion / 1x Gain / 2x Constant /2x Sum/ 1x Switch / 1x Discrete State Space / 2x Output (Out1).
2)Double click on the following blocks to modify its parameters:
- Encoder:Change the port to port C, reset mode as no reset, and sample time to -1.
- Data Type Conversion: Output type to double, Integer rounding mode to Simplest.
- Gain:Change one block to pi/180 and one to -1 (both with element wise multiplication).
- Discrete State Space:Change the A,B,C,D matrix to the name of your A,B,C,D matrix that represents your discrete state space model stored on the workspace. Use the Sample time as you want ,can be 0.010. ( Be sure to use the same Sample time on the pendulum encoder and on the model configuration – will be explained later)
- Output:Change the name for Pendulum Angle and Pendulum Velocity.
- Constants: Change the value to pi (pi should be stored on your Matlab workspace).
- Switch: Change the criteria to u2 >= Threshold and Threshold to 0.
- SUM:Change one to ( +-|) to be used on the top input , and one to (–|) to be used on the bottom input.
3) Connections:Connect the blocks as shown in the picture. After connecting, select all the blocks and create a subsystem.
End of Part I): For better understanding ,organize your subsystem as shown in the picture.Pay attention to the output order (OUTPUT NUMBER) , you should follow the same order as shown in the picture (to create the right [u] matrix).

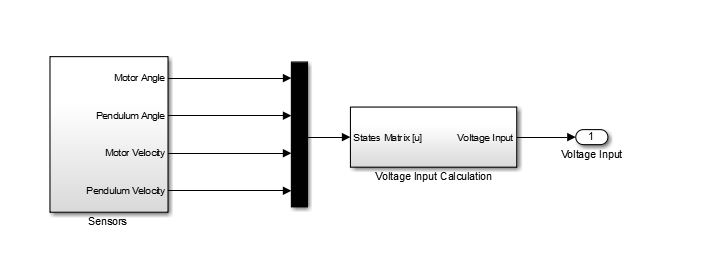
Part II) Calculating the input to be sent to the motor
- Input Calculation Logic:Now that we have our “[x]” matrix with the states of our system , we can calculate the motor input as [K]*[u] , where [K] is our optimal gain matrix from LQR (Can be calculated using Matlab). We just need to do a matrix multiplication and its done.
1)Drag the following blocks to the work area: 1x Mux / 1x Gain / 1x Output(out1).
2)Double click on the following blocks to modify its parameters:
- Mux:Change the ports number to 4
- Gain: Change the gain value to the name of your Optimal Gain matrix stored on your workspace, and the multiplication to matrix.
- Output: Change the name to power input.
3) Connections:Connect the blocks as shown in the picture. After connecting, select all the blocks and create a subsystem.
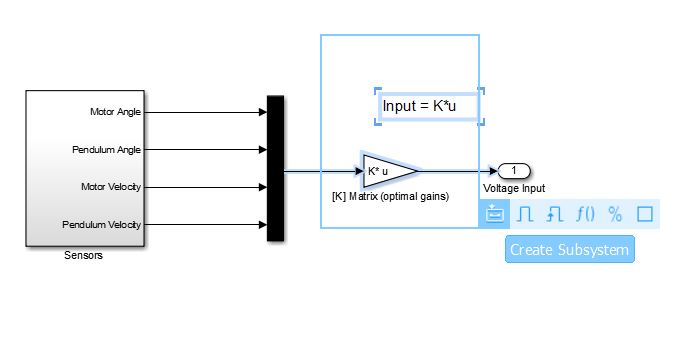
4)Organizing: Change the name of your subsystem and the name of input and output to representative names , as shown in the picture:
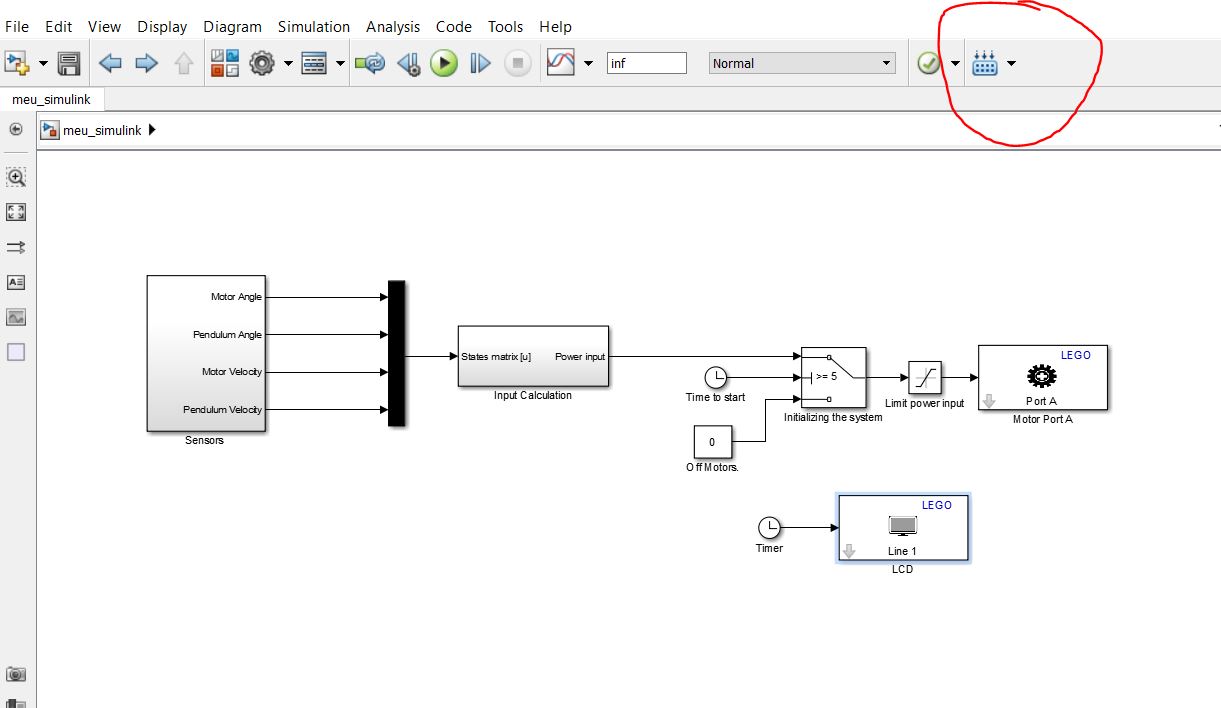
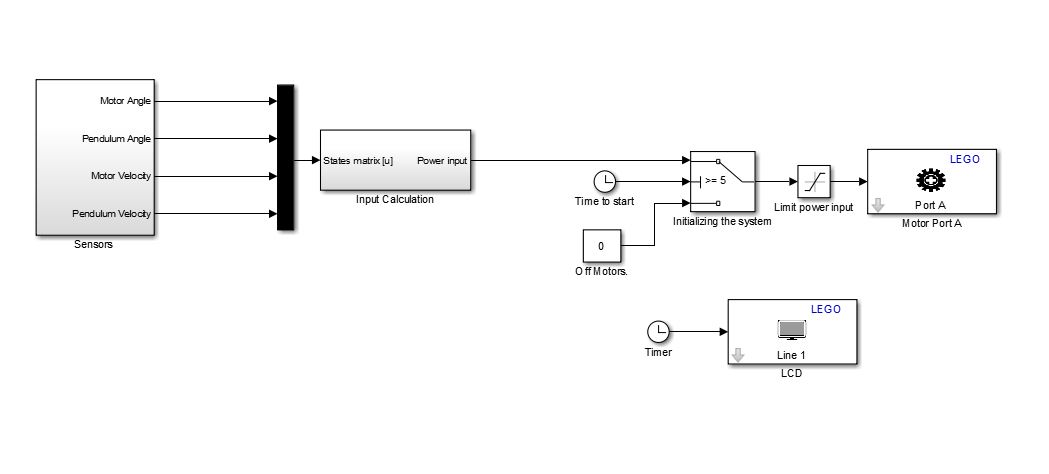
Part III) Sending the input to the motor
- Motor Input Logic:Now that we have our input calculated, we just need to send it to the motor. As the Lego motors only takes -100 to +100 values, we can use a saturation block to limit the input. For the convenience, we can use a switch block to set a time to start our model (this way we can safely deploy the model to the brick, lift the pendulum to the top position and then the system start balancing).
1) Drag the following blocks to the work area: 1x Switch / 2x Clock / 1x Constant / 1x Saturation /1x Motor/1x LCD
2)Double click on the following blocks to modify its parameters:
- Constant: Set the Value to 0.
- Motor:Change the port to A and the stop action to brake.
- Switch:set the conditional to u2 >= Threshold and Threshold as the time that you want to your system to start (entering 5, after 5 seconds of the program start, it will start balancing).
- Saturation:change the values to +100, -100.
- LCD:Change the label to “time” and the line to 1.
3) Connections:Connect the blocks as shown in the picture. No need to create a subsystem.
4) Organizing:You can add a Clock block and connect to a LCD block to see on the screen the running time.
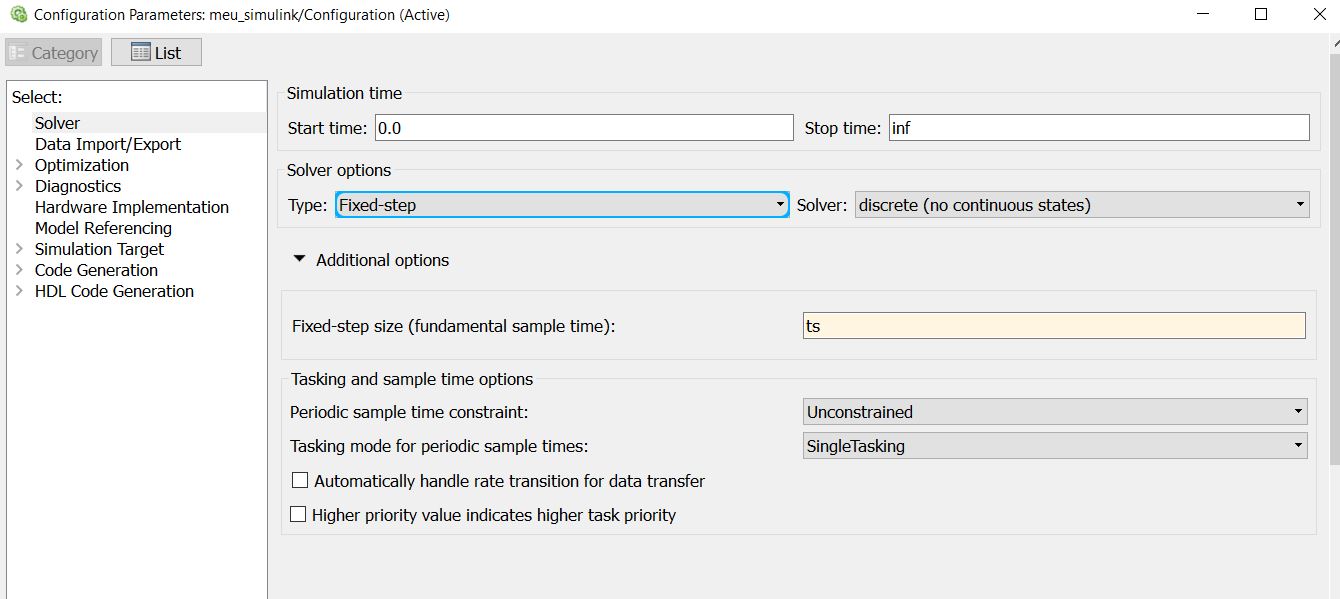
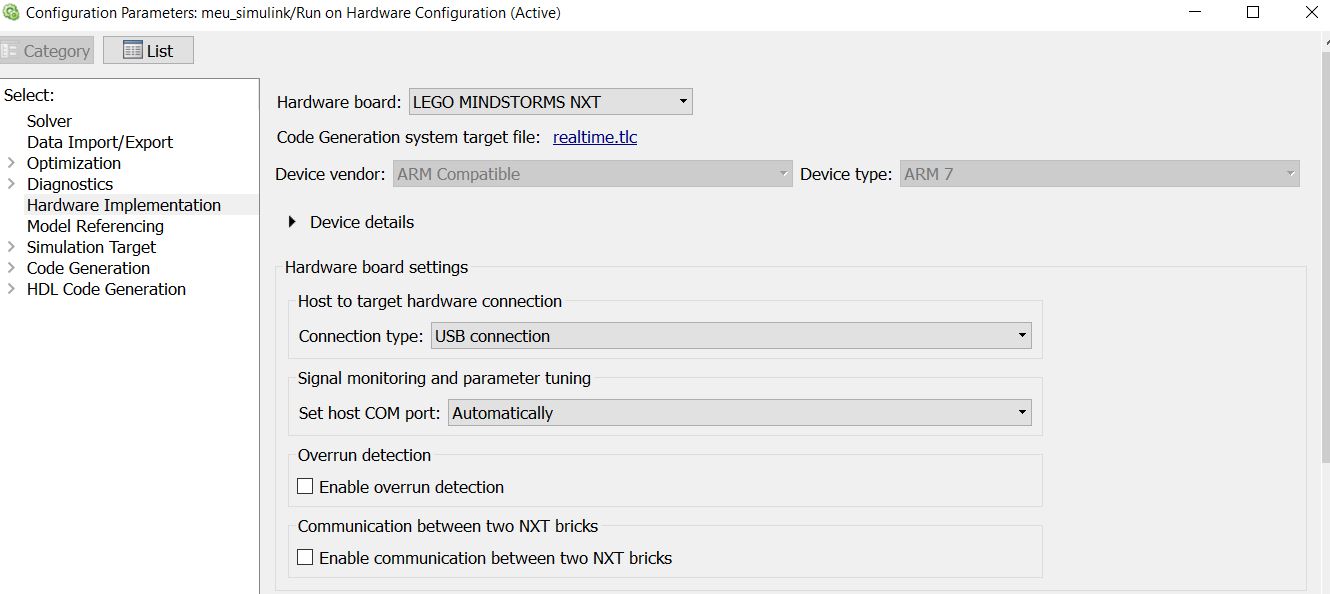
Part IV) Configurations and running the model
1) Click on the Simulation tab on the top of the window and then click on Model Configuration Parameters. Change the Solver tab and the Hardware implementation tab as shown in the pictures. The step size can be typed on the tab or can be a variable stored on your Matlab workspace (I'm using 0.010s).
2)Running the Model: The run the model , click on the Deploy to Hardware buttom , on the right top corner . If you did everything OK , the system will load a little bit and then your brick will start running the program.