
This is an old revision of the document!
Inverse Kinematics using Damped Least Squares method in Matlab
Before you go straight to the C++ application that will send the joint angles solution given by the Damped Least Squares to your Dynamixels servos is useful to check if your solution is right , by visualizing the Serial Arm motion between the initial and the final position .
We can code the same algorithm used in the C++ in the Matlab and use the RVC robotics toolbox to animate a Serial Arm similar to the DASL serial arm (with the same DH-parameters and specifications ) and check the motion.
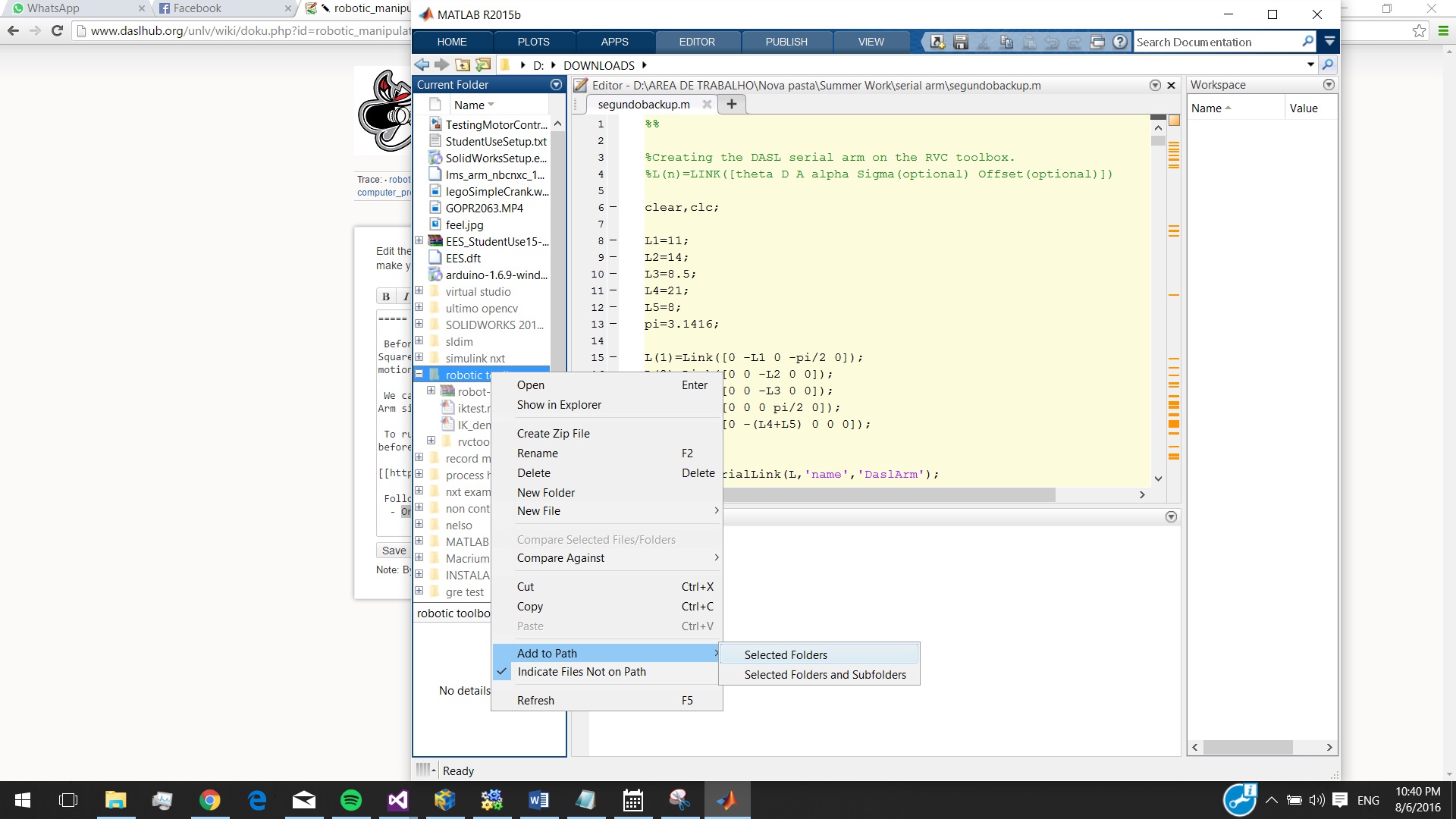
To run this application you must include the robotics toolbox folder in the Matlab Path , and run the Startup file before running the IK program.
Follow this two steps before you run the Matlab program.
- Add the rvc folder that you downloaded into the matlab path
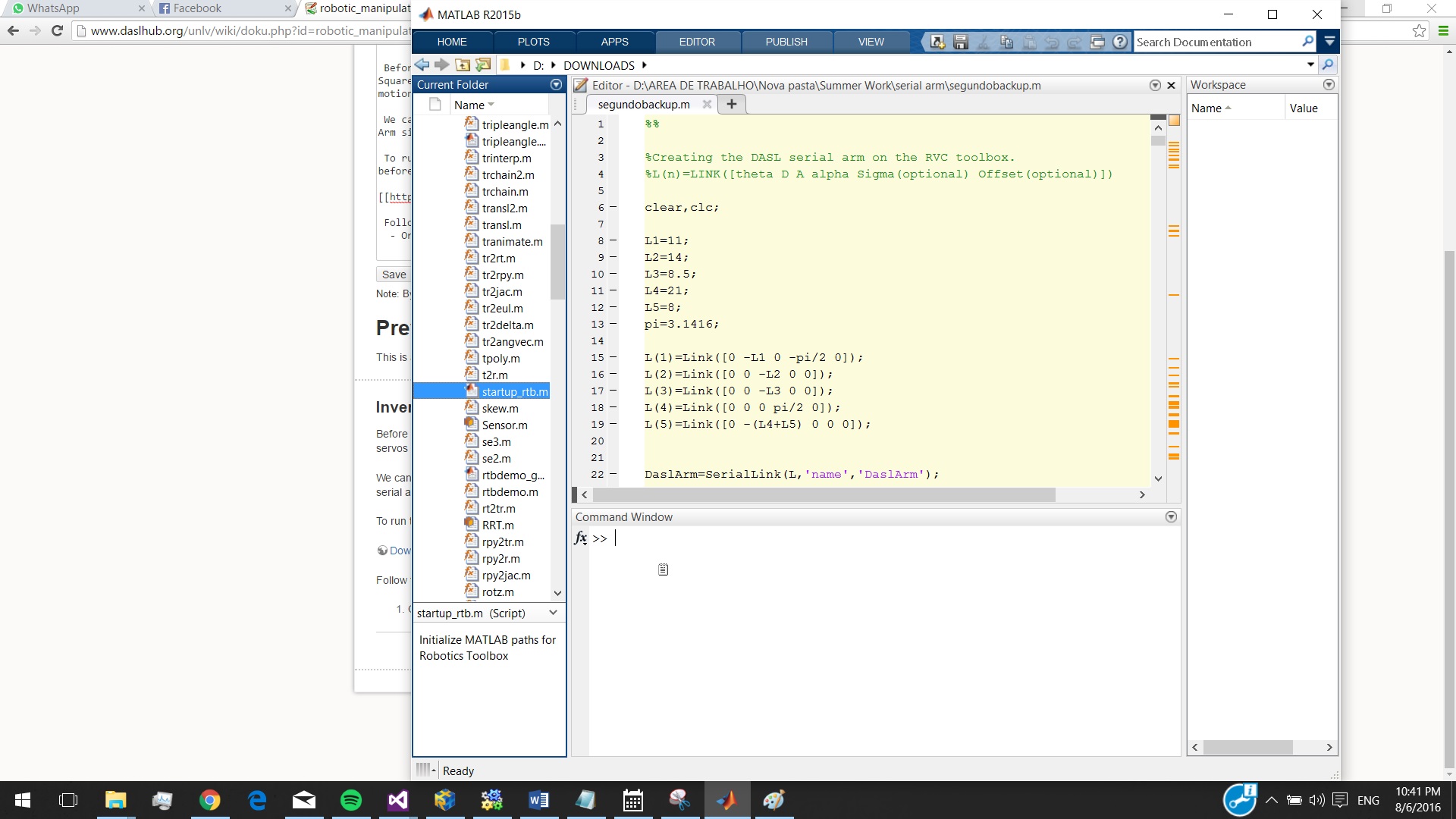
- Run the startup_rtb file under the robot folder. (to run just drag the file into the command window)
Program running