This is an old revision of the document!
PID CONTROL
We can analyze the whole system into two distinct transfer functions , one for the ball and beam , and one for the motor. After , we can analyze the whole system putting these two transfer functions together in a block diagram.
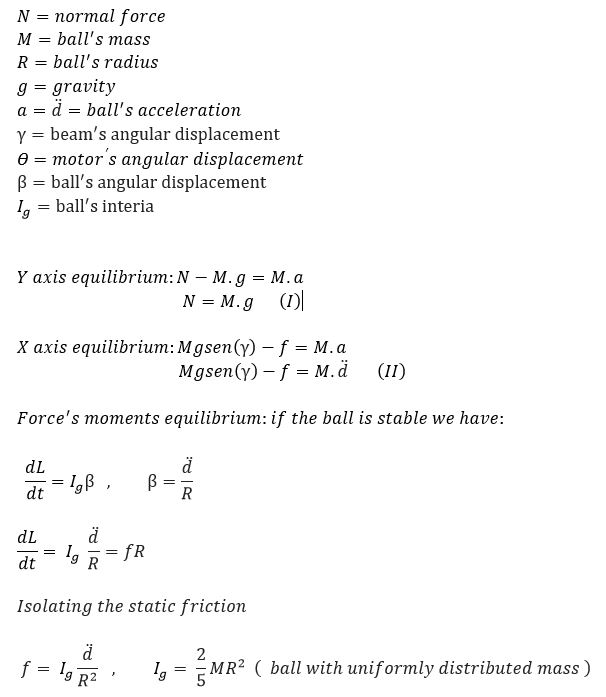
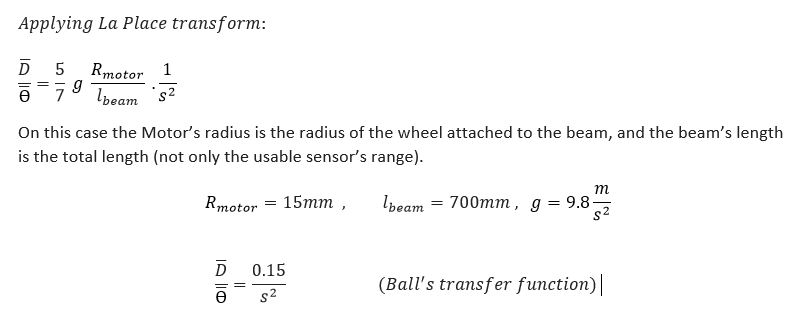
Ball and Beam Transfer Function Derivation
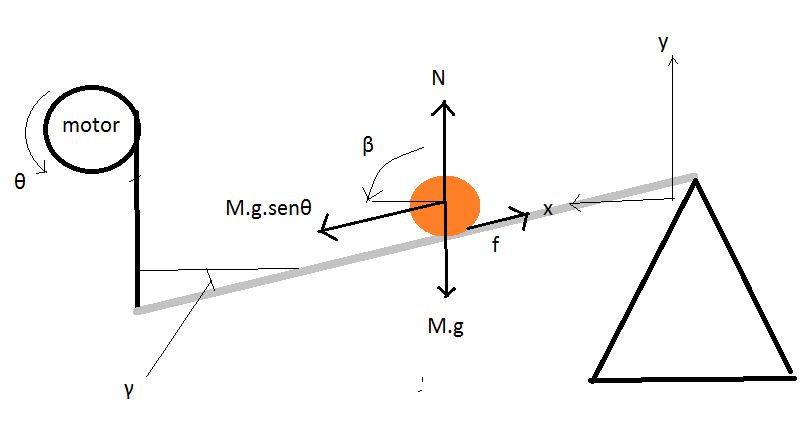
Analyzing the equilibrium we have:

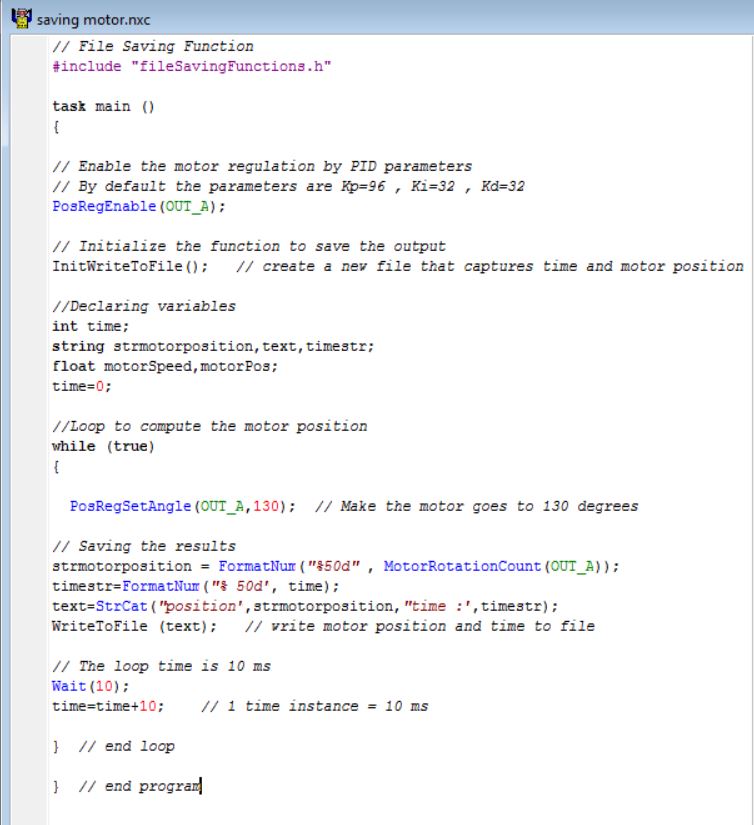
Motor Transfer Function Derivation
One easy way to get the motor's transfer function is to plot and analyze its response to an input , and by a graphical analysis get the parameters to derive its transfer function. We can program an algorithm to read and save ( using file saving functions ) the motor position during its operation. The following code was used to save and after plot the motor response until it get to the desired angle.