
Table of Contents
MM-UAV Arms Assembly
Author: <Dongbin> Kim Email: akdba0207@gmail.com
Date: Last modified on <05/25/16>
Keywords: <Mobile, Manipulation, MM-UAV, Robot, Arms, Drones>
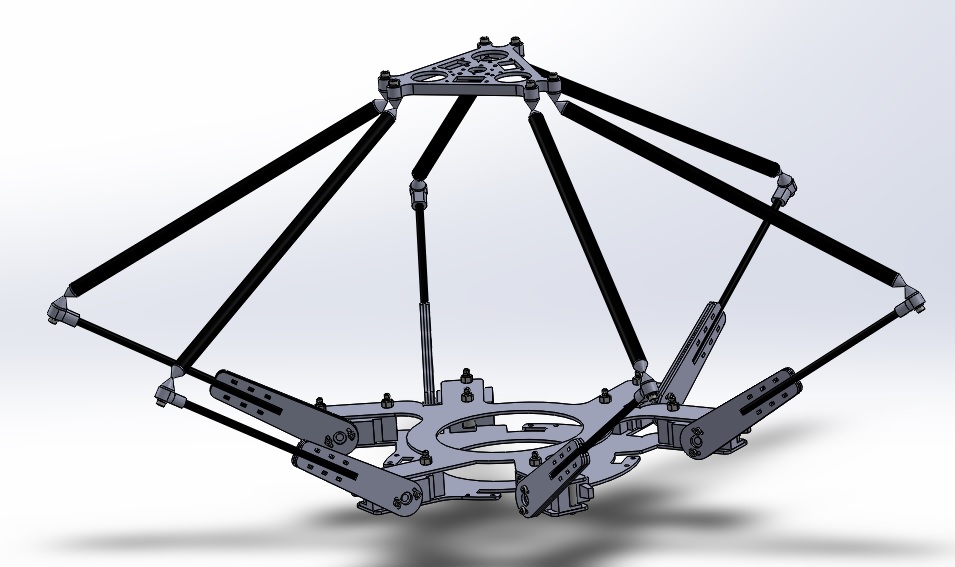
The photo above depicts MM-UAV Arms Assembly which allows drones to do missions. The big picture problem is that Drone doesn't have a particular arms to carry some stuff or do missions. Solving this partially or completely is important because it will probably lead you to the further research with wider knowledge. This tutorial shows you how to make MM-UAV Arms and takes approximately 40 hours to complete.
Motivation and Audience
This tutorial's motivation is to manipulate drone to do various missions. Readers of this tutorial assumes the reader has the following background and interests:
* Know how to assemble simple robot
* Perhaps also know how to run Arduino/C++
* Perhaps additional background needed may include Servo Motor Control
* This tutorial may also attract readers who interested in advanced UAV research
The rest of this tutorial is presented as follows:
- Final Words
Parts List and Sources
US-based vendors to obtain material to complete this tutorial include Mcmaster.com
To complete this tutorial, you'll need the following items.
| PART NAME/DESCRIPTION | VENDOR | VENDOR Number or URL | PRICE | QTY |
|---|---|---|---|---|
| Weather-Resistant Polyester Twine - .033“ Diameter, 50 lb Breaking Strength, 100' Length | McMaster-Carr | http://www.mcmaster.com/mv1457470370/#catalog/8936T41 | 12.5 | 1 |
| Rigid Carbon Fiber Shapes Round Tube, .315” OD, .236“ ID, 48” Length | McMaster-Carr | http://www.mcmaster.com/mv1457470370/#catalog/2153T37 | 18.4 | 1 |
| Rigid Carbon Fiber Shapes, Round Tube, .156“ OD, .110” ID, 48“ Length | McMaster-Carr | http://www.mcmaster.com/mv1457470370/#catalog/2153T32 | 10.89 | 1 |
| Steel Extension Spring 1.875” Length, .219“ OD, .023” Wire - Pack of 12 | McMaster-Carr | http://www.mcmaster.com/mv1457470370/#catalog/9654K417 | 8.73 | 1 |
| Small zip ties | McMaster-Carr | http://www.mcmaster.com/#7130K101 | 6.54 | 1 |
| M3x25mm Button Head Machine Screws | McMaster-Carr | http://www.mcmaster.com/#92095A186 | 6.13 | 1 |
| M3 Nyloc Nuts | McMaster-Carr | http://www.mcmaster.com/#90576A102 | 3.27 | 1 |
| M2.5x5mm Cap Head Machine Screws | <McMaster-Carr | http://www.mcmaster.com/#92290A055 | 3.81 | 1 |
| Type 18-8 Stainless Steel Flat Washer M2.5 Screw Size, 2.7mm ID, 6.0mm OD - Pack of 100 | McMaster-Carr | http://www.mcmaster.com/mv1457470370/#catalog/93475A196 | 1.58 | 1 |
| M2x6mm Cap Head Machine Screws | McMaster-Carr | http://www.mcmaster.com/#91292A831 | 6.53 | 1 |
| M2 nut | McMaster-Carr | http://www.mcmaster.com/#94150A305 | 2.66 | 1 |
| Nylon Unthreaded Spacers, 1/4“ OD, 1/2” Length, for Number 6 Screw Size - Pack of 100 | McMaster-Carr | http://www.mcmaster.com/#94639A303 | 8.86 | 1 |
| EconomyPlate™ Solid Carbon Fiber Sheet ~ 1/16“ x 12” x 12“ | DragonPlate | https://dragonplate.com/ecart/product.asp?pID=3932&cID=93 | 30.75 | 2 |
| Hitec HS-85MG+ Servos | Servo City | https://www.servocity.com/html/hs-85mg__mighty_micro.html#.VuIogZwrJhE | 29.99 | 6 |
| Pololu Micro Maestro 6 channel servo controller | Pololu | https://www.pololu.com/product/1350 | 19.95 | 1 |
those parts need to be 3D-Printed. Follow the menu 'How to do 3D-Printing' to make the materials.

Corn Bearing (24)

Top plate(1)

Master link end pieces(6)


3D printed plates(1)
Here is the list as a Google XLS document
Construction
This section gives step-by-step instructions along with photos to assemble MM-UAV arms.
Step 1. How to do 3D-Printing

- Open Solidpart file, or any CAD file that you can convert into (.STL) file.

- Select “Save as” to save the part file as (.STL) file.

- Select (.STL) type, then Save.

- Go to workdesk where you can see ROBO 3D Printer.

- Find 'Matter Control' file and run.

- This is the display you will see.

- Find 'ADD' button at the bottom left. then add the STL file that you just converted from Solidworks

- Click 'View' button.

- You are lucky if you get to see CAD model fit on the plate.

- But, Normally you are going to face this issue. The more the model gets fit on the plate, the better quality materials you get.

- Find 'Edit' button from the bottom left, then click it.

- You are going to see those menus on the top right.

- Use the correct menu to adjust the model until it fits on the plate.

- Click 'Save'

- On 'Matter Control' display, find 'Settings & Controls' button. then Click it.

- At 'Settings', go 'General' then find 'Support Material'. Support Material is to help 3D Printer create the material precisely by surrounding the original model.
- Recommendation : 10~20 support% for normal CAD design.
Step 2. MM-UAV arm

- Cut the Rigid Carbon Fiber Shapes round tubes(Small and Large) into 8 inches per a piece, you are going to get 8 pieces of both small and large tubes.


- Put connector A in the Tubes.

- Drill two holes on the bracket in a size of M2*6mm screw and M2 nut.



- Anchor the screw on the servo arm plates following the picture. Up to the quality of 3D printer, you might need to drill the hole to bigger to create space for screws. Then, assembly the rests with Carbon Fiber arm

- You should twist the arm until the plate and the connector arranged vertically.

- Zip tie the arms.

- Complete
Step 3. MM-UAV plate and servo assembly


- Inside of the servo motor box, you can see 2 brackets. Use scissors to cut one of the edge side, then connect them to the servo motor.

- Put drill on each hole on the plate, drill the bigger for the M2*25mm screws.


- Place servomotors on the Bottom plate, put M2*25mm screws from the bottom, then cover them with Nylon unthreaded spacers.

- Put the top plate, then fix it with M3 Nyloc nuts.
Step 4. MM-UAV Slave arm-Servo arm-Top plate assembly


-Prepare Connector A, Servo arm, Top plate.


-Cut Weather Resistance Polyester Twine into 30cm for 12 lines, bind both side of Steel extension spring together. You are going to make 6 pairs.

- Put each pair into Carbon Fiber Tube(.315”OD). - Then, put the Twine into Connector A like “ —⇐=============⇒—– (— : twine), (<,> : Connector A) - use superglue to stick the connectors on the tube. - If the surface are rough, use sandpaper to make it smoother. It will stick easier.

- Connect Connector A to Servo-arm with superglue - Put Twine from Slave are into the connector on Servo Arm. - Pull the Twine until you feel the string touch the edge. like —-⇐===ooo>←— (— : Twine, <,> : Connector, ooo : Spring)


-Use M2.5*5mm Screws with Flat washers to anchor the twine. Then, make a thick knot near the screw.

- Make 6 pairs.

- Put Connector A into each hole on Top plate with superglue.


- Mark numbers on top plate and servo plate to connect the both correctly.

- Put Twine through the connectors on Top plate. And pull it until you see no space between connectors and you feel force from the spring, then use a pen to mark it.

- Pull the twine to 2cm and Use M2.5*5mm screw and Flat washer to anchor the hole. We are going to use force from spring to stand the UAV, you should pull the twine 2cm from each slave arms to the balance.

- Connection complete.


- Connect the servo arm on the motor, you should make sure each number you have drawn on both plates are matched.
-NICE JOB!
Step 5. Connect the motors with servo controller.
1. Install the software “Maestro Servo Center”
-Visit the link below, install the software and watch Youtube demonstration. It will help a lot!
Link : https://www.pololu.com/product/1350
2. Servo motor adjustment with Pololu Maestro Servo Center.


- For the adjustment, make sure you do this without servo-arm attached.
- With the software, see the photo on the left, you should turn shaft on opposite direction of movement to maximum because it has to move from vertical to horizontal to manipulate easier. Then, attach vertically the arm on the shaft.
Final Words
This tutorial's objective was to build up MM-UAV arms. Complete building up MM-UAV arms for your Drone-Robot combine work. Once the concepts were conveyed the reader could create ideas for further research.
Speculating future work derived from this tutorial, includes Hose-Handling, Carry package etc.. In the big picture, the problem of carrying stuff with flying object or etc. can be solved with this tutorial.
For questions, clarifications, etc, Email: akdba0207@gmail.com