What is PID control
PID Control
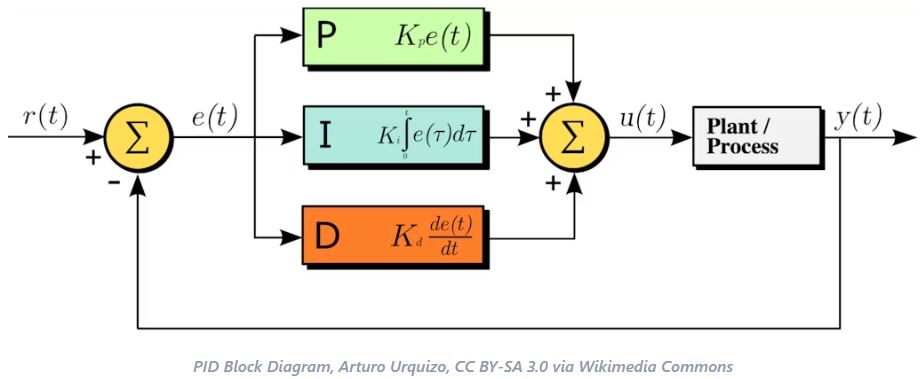
- A feedback-based control loop that compares the actual value with the target value.
- Combining the Proportional, Integral, and Derivative components, PID control reduces the system's error to make the output reach the set point and maintain that sate effectively.
- u(t) = {Kp x e(t)} + {Ki x ∫e(𝜏)d𝜏} + {Kd x de(t)/dt}
- u(t): control signal
- e(t) = Set point - process variable
- Kp: Proportional gain, Ki: Integral gain, Kd: Derivative gain
(i) Proportional

- The error is corrected in proportion to its current magnitude.
- P control output = Kp x Error
- If Kp is too large, overshoot and oscillation may occur.
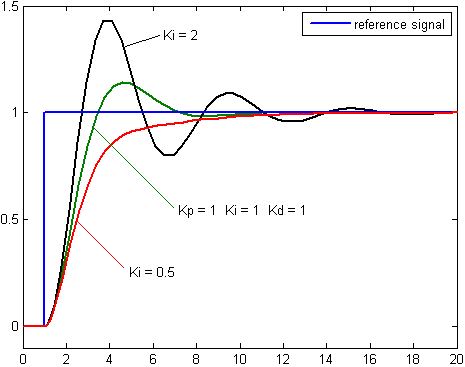
(ii) Integral

- The error is corrected by considering the accumulated error over time.
- It helps eliminate small, long-standing errors, known as steady-state error.
- I control output = Ki x ∫(Error)dt
- If Ki is too large, the system may respond slowly or become unstable.
(iii) Derivative
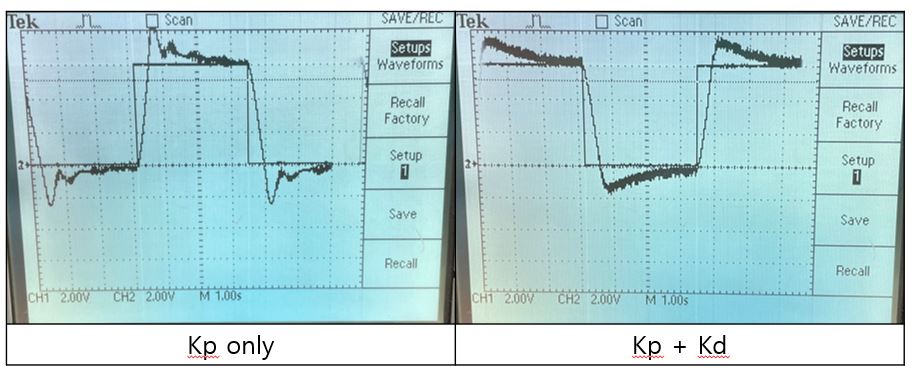
- The derivative term predicts future error by analyzing the rate of change of the error and suppresses excessive responses.
- D control output = Kd x d(Error)/dt
- It reduces oscillation and helps stabilize the system smoothly.